
Tools:
I'm thrilled to be a part of AI Racing Tech, competing in the prestigious Indy Autonomous Challenge (IAC), where the world's fastest self-driving vehicles go head to head. My role involves pioneering state-of-the-art algorithms, enabling precise localization in GPS-denied environments for our million-dollar race car.

Tools:
Five month research at the CNRS-AIST JRL in Japan on Computer Vision for Robotics. My main focus was on detection and 6 degree-of-freedom (6-DOF) pose estimation of objects in unknown set-up. Using a obile manipulators robot with a RGB-D camera, I developed a method for detecting an object from any view point and determine its 6-DOF pose with enough accuracy for grasping and manipulation. As industrial applications were considered during the project, the overall system was though to be easy to deploy with minimal human intervention. The training can be done with only a few non-annotated pictures of the object on a plain background, using synthetic data generation. Paper published at the IEEE/SICE IEE conference: Link - PDF.
Tools:
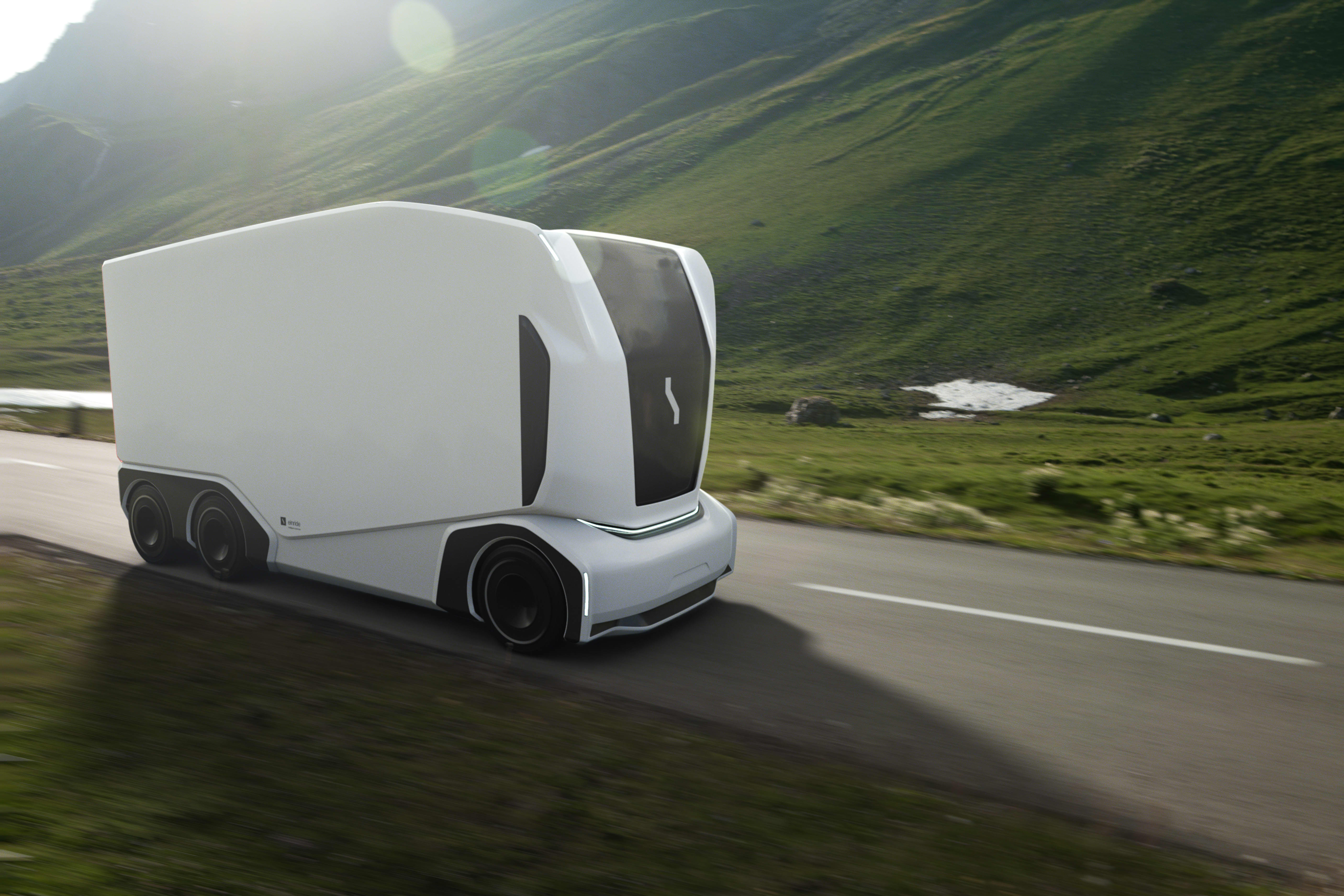
I worked on embedded software of the Einride Pod, first autonomous electric truck approved to operate on public roads by the National Highway Traffic Safety Administration (NHTSA) in the US. As a member of the highway team, I developed from scratch prediction and maneuver recognition capabilities. I tested my work extensively in complex simulations before integrating it to the main software of the pod for real use on test tracks.
Made with:
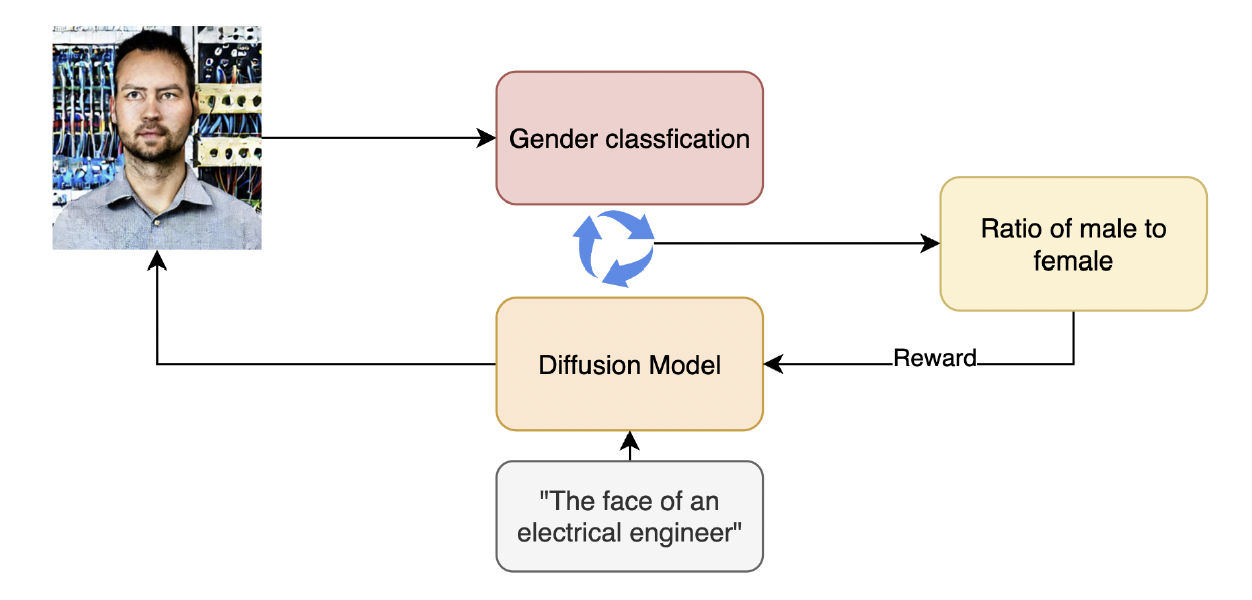
Addressing biases in Artificial Intelligence (AI), especially in generative models, remains paramount for responsible AI development. In this research project, we explore the potential of Reinforcement Learning from AI Feedback (RLAIF) to steer image generation models towards more unbiased outputs. We use a pretrained diffusion model and evaluate the gender unbalance through a gender classification Transformer model. We first show that RLAIF is able to shift the gender balance of diffusion model outputs without visible effect on image quality. Then we demonstrate its effectiveness in reaching gender balance within a few training steps. Finally we discuss trust regions consideration and generalization of our results.
Made with:
This project focuses on the application of Reinforcement Learning (RL) techniques to the domain of volleyball. Specifically, it aims to improve an existing Unity environment that uses the ML Agents library to train agents playing 1v1 volleyball games. The project had two components: (1) enhancing the existing environment using reward engineering techniques to speed up the training process and (2) developing and comparing several methods for implementing cooperation in 2v2 volleyball games with RL agents.
Made with:

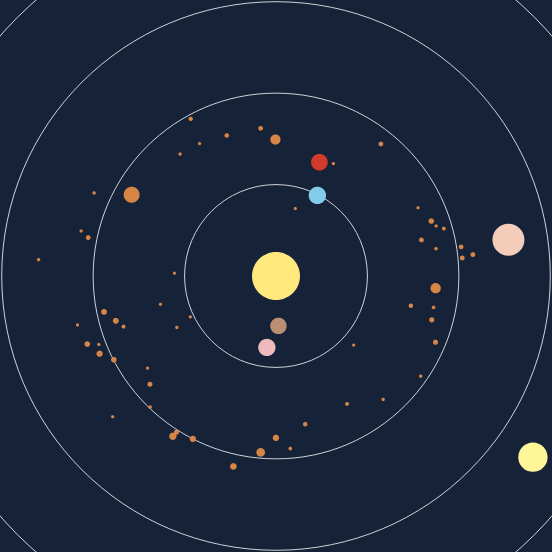
Orbys is a visualization tool for asteroids in the Solar System. It uses data from the Jet Propulsion Laboratory (JPL) Small-Body Database. It was made during a class on Data Visualization given by Emmanuel Pietriga and ranked 1

Made with:
Wind power is a crucial component in the shift towards sustainable and renewable energy to combat the effects of climate change. The design of a wind farm, however, involves a multi-faceted process about the layout of the farm but also the cable routing. This last problem is about how to electrically connect the turbines of the farm in order to minimize the cost of the cables. Indeed, the expenses for electrical infrastructure account for 15–30% of the overall initial costs of an offshore wind farm. This project starts from a deterministic Mixed Integer Linear Programming (MILP) framework and extend it to model the uncertainty related to the power production of the turbines. Then, we present a two-stage stochastic optimization method that we compare to a more robust optimization based on a pessimistic approach.
Made with:
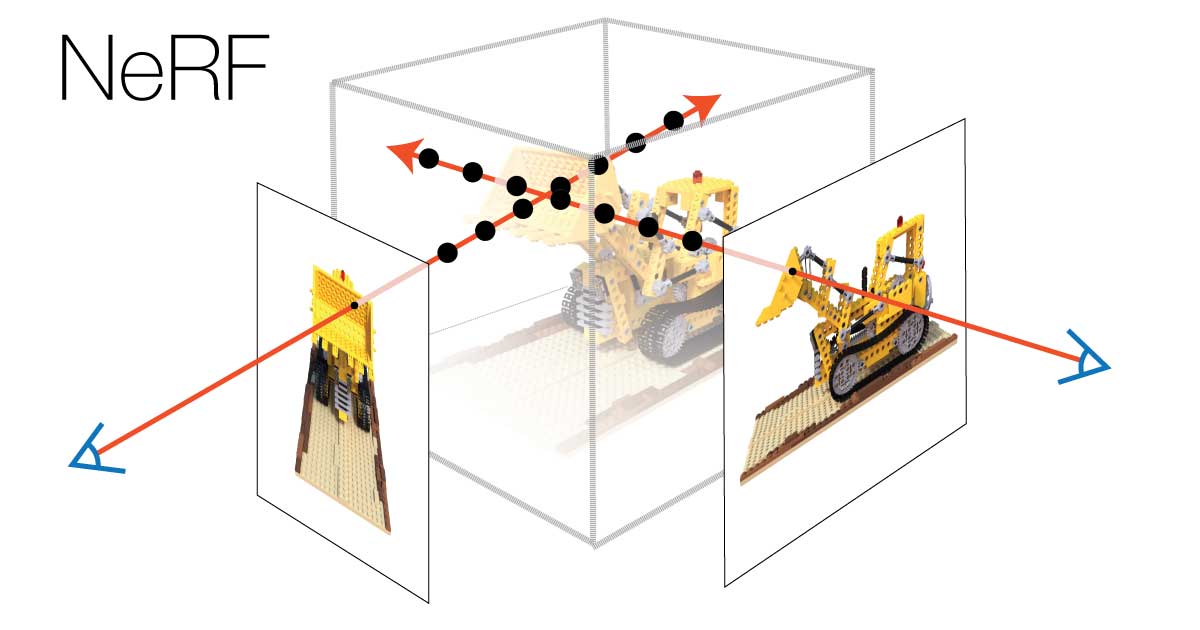
This is an extended version of Tiny NeRF from NeRF: Neural Radiance Fields implemented in PyTorch. With the exact same architecture, this implementation is ~10% faster in training than the original in TensorFlow. Using a custom architecture, this implementation achieves an equivalent performance with a three times faster training.

Made with:

In a team of four, we worked to develop an AI for Starcraft with BWAPI. Our real-time AI uses behaviour trees to perform decisive & collaborative actions. We won a contest against other local teams.
Made with:
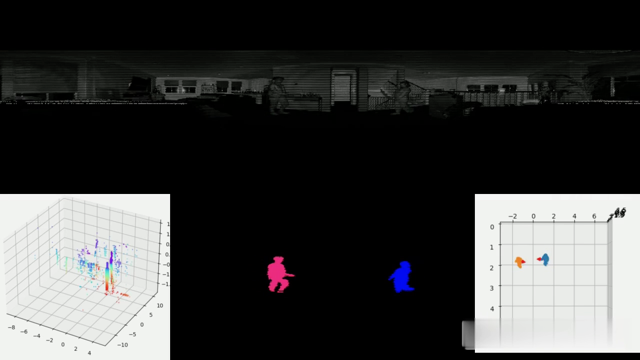
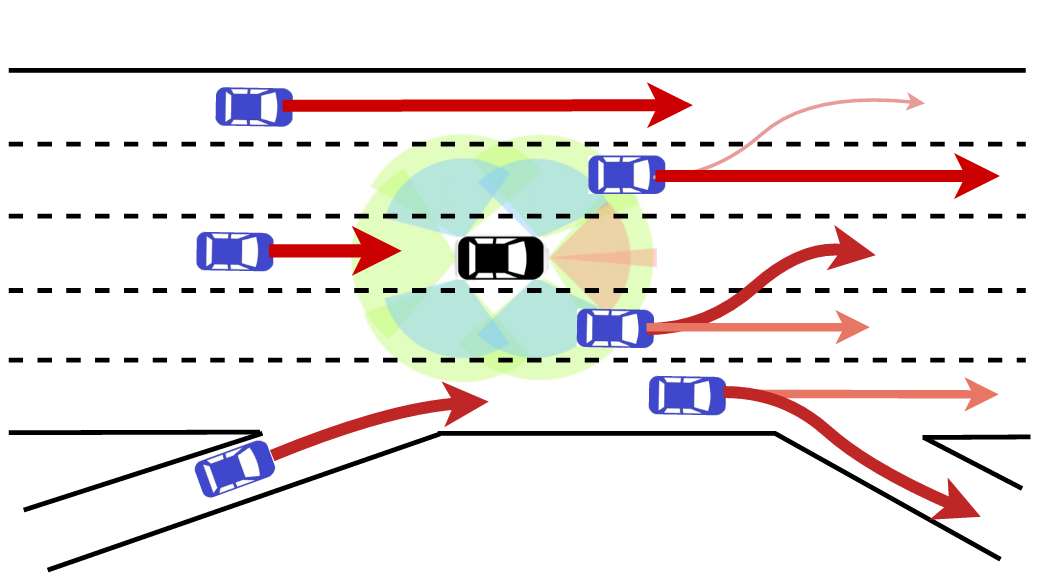
In this project we develop and present two methods to detect, track and predict pedestrian using only LiDAR data. We work with unmoving LiDARs only, as in a smart infrastructure use case. We discuss the challenges encountered to detect and cluster objects and the solutions we deployed.
Made with:

I pursued research during 8 months at Heex Technologies in parallel with my master. I worked with Arnaud de La Fortelle on targeted generation of smart data to enhance autonomous driving capabilities, with a focus on collision prediction. The work produced during this project is non-public.
Made with:
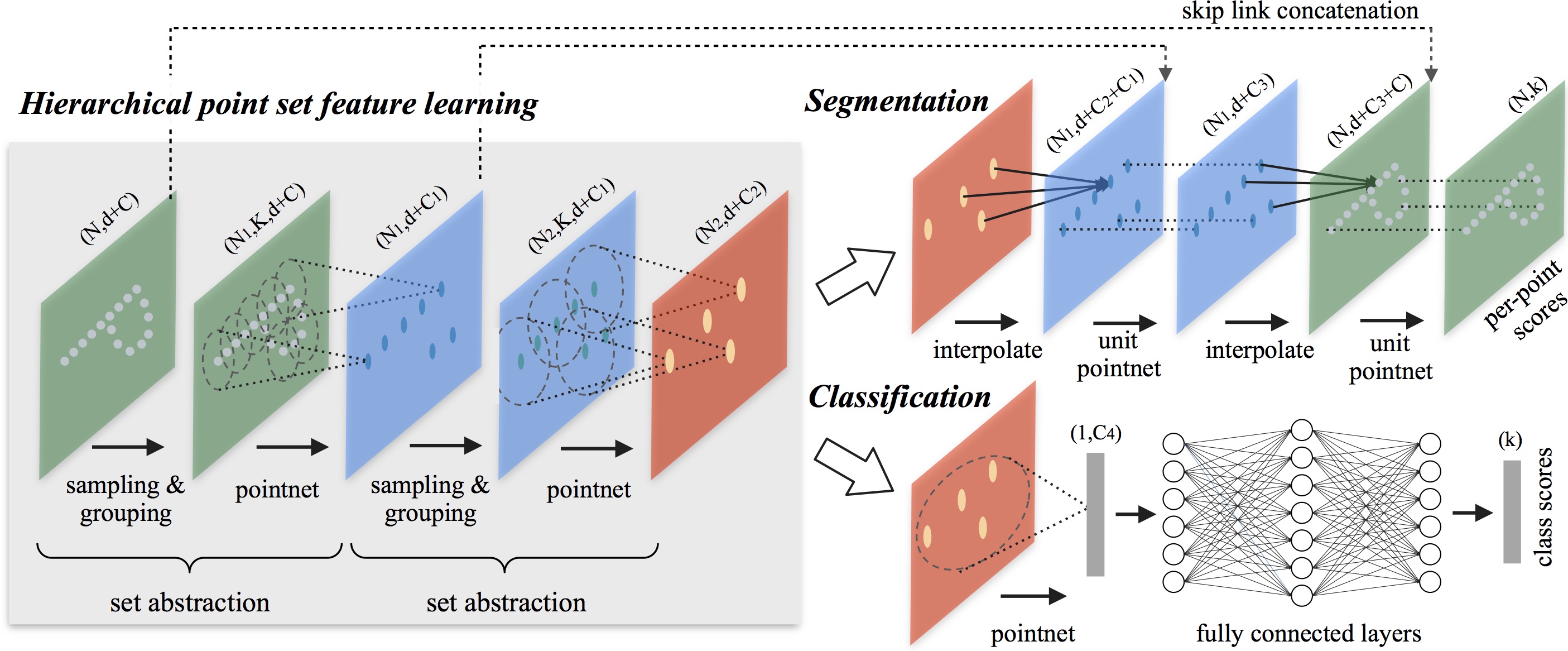
A simple implementation of PointNet++ in PyTorch with a slight improvement over the original method. PointNet++ is a deep learning architecture designed for analyzing point cloud data. It builds upon the original PointNet model by introducing hierarchical grouping and feature learning. PointNet++ hierarchically partitions the input points into local regions and extracts local features using shared multi-layer perceptrons (MLPs). These local features are then combined in a hierarchical manner to capture both local and global information, enabling effective learning and understanding of complex 3D structures from point cloud data.

Made with:
The goal of this project is to design optimal schedulers to transmit data packets to smartphones (or users) through a wireless medium, which is divided into a set of frequency channels. We explore and compare several algorithmic methods such as greedy algorithms, Branch&Bound or Dynamic programming. We also address the online problem with a custom solution.
Made with:
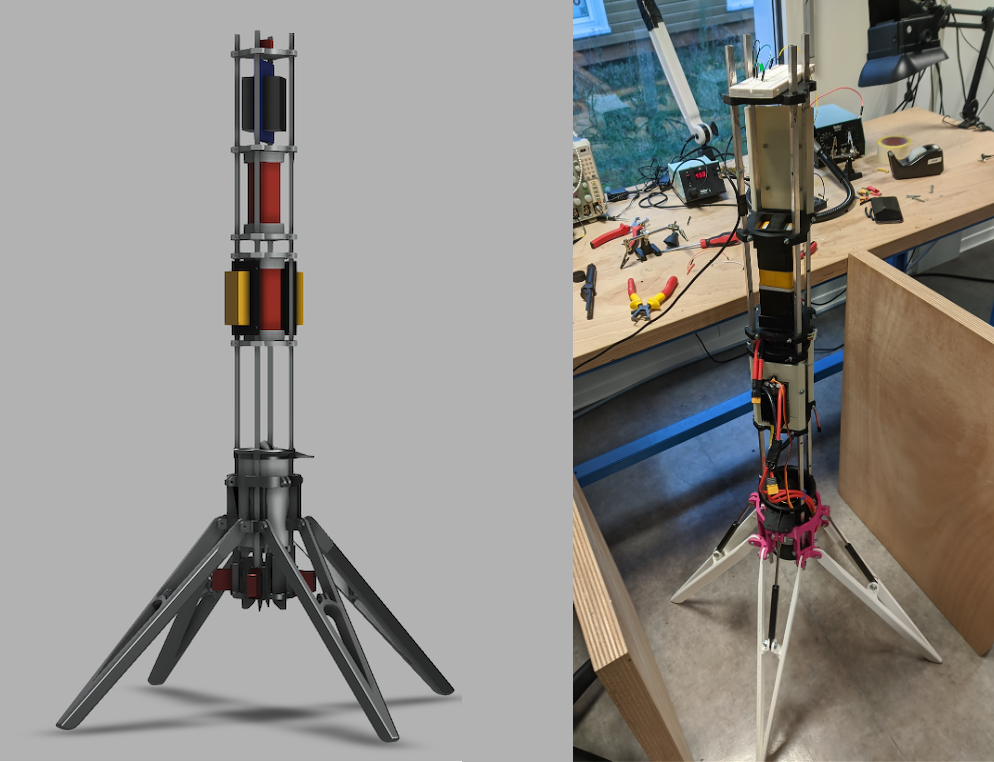
In a team of five, we worked on developing a Vertical Take-off and Landing (VTOL) electrically-powered rocket. I developed the rocket's control algorithm as well as a Kalman Filter, using measurements from a GNSS-Aided Inertial Navigation System. We worked with MBDA engineers and VectorNav provided us a VN-300 IMU.

GPA - 3.97/4.0
GPA - 3.95/4.0
GPA - 3.99/4.0
